从并发模型看 Go 的语言设计
传统的程序语言设计都不会将输入输出作为语言的核心,但 Tony Hoare 认为输入输出是基本的编程原语,且通信顺序进程(Communicating sequential processes,CSP)的并行组合(这里可能用「并发」会更为准确)是基本的程序组织方法。Go 语言的并发设计就是基于 CSP 模型的。
在最初的 CSP 模型中,程序总由若干个可以相互通信的进程构成,其中每一个进程内部是顺序执行的(这也就是 CSP 名称的含义)。注意这里的「进程」并不一定指操作系统中的进程,也不一定是操作系统的线程,它是一个抽象的概念,代表一组计算的序列,例如 goroutine 这种在应用层调度的计算序列也算 CSP 中的「P」。与 Go 语言不同的地方在于,这个最初的设计中并没有通信管道的概念,每个进程是直接和另一个进程进行通信的,但在 Go 语言中,goroutine 是匿名的,一个 goroutine 并没有办法直接将消息发给另一个 goroutine,为了实现 goroutine 之间的通信,Go 语言提供了 first class 的 channel,消息通过 channel 来从一个 goroutine 发到另一个 goroutine。而且,Go 语言也不要求 goroutine 内部是顺序执行的,goroutine 内部可以创建更多的 goroutine,并发地完成工作。
下面,我们通过例子说明基于 CSP 模型是如何组织程序的。
阶乘计算
首先来看的是一个计算阶乘的例子,阶乘的一个简单的递归实现可以是这样的:
fact 0 = 1
fact n = n * fact (n - 1)
而基于 CSP 组织程序,我们可以这样做:
// 阶乘计算的实体
func FactCalc(in <-chan int, out chan<- int) {
var subIn, subOut chan int
for {
n := <-in
if n == 0 {
out <- 1
} else {
if subIn == nil {
subIn, subOut = make(chan int), make(chan int)
go FactCalc(subIn, subOut)
}
subIn <- n - 1
r := <-subOut
out <- n * r
}
}
}
// 包装一个阶乘计算函数
func MakeFactFunc() func(int) int {
in, out := make(chan int), make(chan int)
go FactCalc(in, out)
return func(x int) int {
in <- x
return <-out
}
}
MakeFactFunc 就是简单地封装一下 FactCalc,获取一个计算阶乘的函数。主要的计算是由 FactCalc 进行的。
每一个 FactCalc 都会被作为一个独立的 goroutine 来执行,对于第 i 个 goroutine 而言,它先从第 i - 1 个 goroutine 中读入一个数字 n,然后,如果 n > 0,这个 goroutine 需要做 3 件事:
- 向第 i + 1 个 goroutine 写入一个
n - 1 - 从第 i + 1 个 goroutine 处读回来一个数字
r - 将
n * r写入第 i - 1 个 goroutine
否则,则向第 i - 1 个 goroutine 处写入一个 1。
如前所述,由于 Go 语言不支持直接向一个 goroutine 发消息,所以这里的消息收发都要基于 channel 进行。我们可以看到,一旦 FactCalc 发现自己无法完成阶乘问题的计算工作,它就会创建另一个 goroutine(只会创建一次),并将子问题发送给这个 goroutine 进行处理,这会形成一个 FactCalc goroutine 的链条,链条上的每一个 goroutine 都与前一个和后一个 goroutine 进行通信(这就是前文所说的「若干个可以相互通信的进程」)。
我们又了这样的阶乘计算器后,我们可以这么去使用它:
const limit = 5
func main() {
fact := MakeFactFunc()
for i := 0; i < limit; i++ {
fmt.Println(fact(i))
}
}
执行程序,我们可以看到这样的输出:
1
1
2
6
24
相比于直接使用递归函数调用,这个实现方式非常不直观。下面这个图可能能帮助理解:
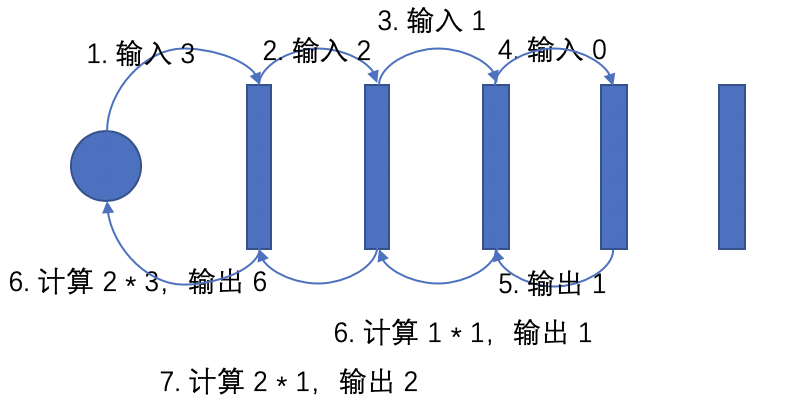
这里的圆形为调用者,每一个矩形都为一个 goroutine,当我们尝试计算 fact(3) 时,会将 3 写入最前面的 in channel 中,数据开始从第一个 goroutine 向后流动。第一个 goroutine 会从这个 channel 中读到这个 3,它将 3 - 1 写入下一个 in channel 中,然后开始阻塞等待 out channel 出现第二个 goroutine 计算的结果,第二个、第三个 goroutine 的计算是类似的,等到第 4 个 goroutine 从 in channel 中读取输入时,它发现这是一个 0,于是直接向 out channel 写入一个 1,此时数据开始从最后一个 goroutine 往回流动,经过第三个和第二个 goroutine 的计算后,第一个 goroutine 会获得 2,然后将 2 * 3 输出。
注意到这里进行阶乘计算的实体并不是递归的函数,而是并发的 goroutine,它们之间通过 channel 进行通信,每个 goroutine 都将计算拆分并发送给其他 goroutine 进行处理,直到计算变为 trivial 的情况。当然了,这个实现相比简单的递归函数会显得很啰嗦,我们在实际使用中也不会这么做,但这个例子说明了如何在 CSP 模型下,利用数据的流动实现我们常见的递归。
素数筛
下面的一个例子中,我们使用筛法来计算素数。所谓素数筛,大概就是对正整数 2 ~ n 进行遍历,然后对每一个数字都进行一次筛选,只留下是素数的部分,对于第 i 位的筛选,我们需要依赖前面已经晒出的 m 个素数,当且仅当这 m 个素数都无法整除第 i 位的数字时,这个数字可以通过这一位的筛选,也就是这样:
primes = primesFilter [2..]
where primesFilter (p:xs) =
p : primesFilter [x | x <- xs, x `mod` p /= 0]
上面这个实现利用了 Haskell 的惰性求值能力,但对于大多数语言而言,我们的实现都不可能这么简洁,基于传统的顺序计算的思路,程序都会比较啰嗦,而且关键是很不清晰。而在 CSP 模型下,我们可以这么实现:
func Counter(out chan<- int) {
for i := 2; ; i++ {
out <- i
}
}
func PrimeFilter(prime int, in <-chan int, out chan<- int) {
for {
i := <-in
if i%prime != 0 {
out <- i
}
}
}
func PrimeSieve(out chan<- int) {
c := make(chan int)
go Counter(c)
for {
prime := <-c
out <- prime
newC := make(chan int)
go PrimeFilter(prime, c, newC)
c = newC
}
}
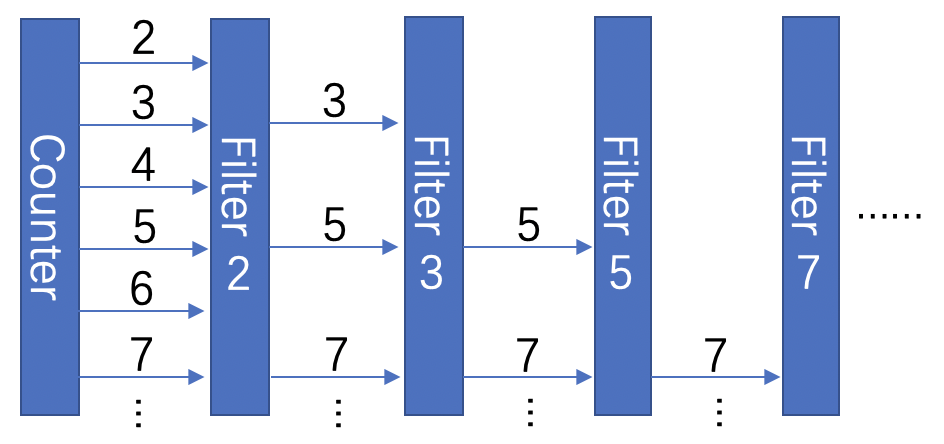
可以看到,我们的素数筛由三个部分组成,首先,Counter 从 2 开始依次产生自然数。PrimeFilter 就是每一层素数的过滤器,每一层过滤器只持有一个输入 channel 一个输出 channel 和一个素数 prime,它将不断从输入 channel 中读入数字,并将其中无法被 prime 整除的部分输出。PrimeSieve 则是一个完整的素数筛,它每获得一个素数,都将素数输出,并创建一个新一层的过滤器,因此整个过程大概是这样的:
PrimeSieve 可以向 out channel 中依次输出被筛出来的素数,这个过程是惰性的,直到我们从 out channel 中取出素数,下一个素数才会被计算。我们可以这样去使用它:
func main() {
primes := make(chan int)
go PrimeSieve(primes)
for i := 0; i < 5; i++ {
fmt.Println(<-primes)
}
}
执行程序,我们可以看到这样的输出:
2
3
5
7
11
从这两个例子中我们可以看到 CSP 模型不一定是用于并行计算,至少在这两个例子中,每一个 goroutine 在进行计算之后都在阻塞等待,同一时间事实上仅有一个活跃的 goroutine,但 Go 语言对 CSP 并发模型的支持能让整个设计变得简单清晰(「并发」和「并行」的区别可以参考这个视频)。这反映到 Go 语言设计上的要点有两个:
- Goroutine 之间可以通过 channel 来进行通信,channel 是 first class value,可以被直接传递。在这种情况下,goroutine 之间很容易进行协作,共同完成一个计算工作。
- Goroutine 十分轻量,可以在单机建立大量 goroutine 而不至于消耗过多性能。对于素数筛的例子,每计算多一个素数都需要多一个 goroutine。而阶乘计算的例子,输入参数 + 1 都需要多一个 goroutine。显然,如果没有系统层调度的「process」的支持,CSP 所能应用的范围就非常局限了。
下面我们再通过另外一个例子看一下 Go 语言的其他设计点。
信号量
一个信号量有两个操作,分别称为 V(signal())与 P(wait())。其运作方式如下:
- 初始化,信号标 S 一个非负数的整数值。
- 执行 P 操作(
wait())时,信号标 S 的值将尝试被减少。当信号标 S 非正数时,进程会阻塞等待;当信号标 S 为正数时,S 被成功减少,进程可以继续往下执行。 - 执行 V 操作(
signal())时,信号标 S 的值将会被增加。
在 CSP 模型下,我们可以这样实现:
type Semaphore struct {
inc chan struct{}
dec chan struct{}
}
func (sem *Semaphore) Wait() {
sem.dec <- struct{}{}
}
func (sem *Semaphore) Signal() {
sem.inc <- struct{}{}
}
func MakeSemaphore(initVal int) *Semaphore {
sem := Semaphore{
inc: make(chan struct{}),
dec: make(chan struct{}),
}
go func(s int) {
for {
if s > 0 {
select {
case <-sem.inc:
s = s + 1
case <-sem.dec:
s = s - 1
}
} else {
<-sem.inc
s = s + 1
}
}
}(initVal)
return &sem
}
*Semaphore 有两个操作,分别是 Wait 和 Signal,它们分别向 dec channel 和 inc channel 发消息。而 MakeSemaphore 中创建的 goroutine 则会根据 s int 状态的不同选择不同的操作,如果 s > 0,则从 inc channel 或 dec channel 中随机读取一个值,并将 s 的值进行增加/减少 1,否则,从 inc channel 中读取一个值,并将 s 的值增加 1。注意这里的「随机」是非常重要的,如果 inc 和 dec 同时都有数据可读,则实际从哪个 channel 中读出数据是不确定的,正是因为 Go 语言的 select 是随机的,我们才可以在这里用它来进行调度。显然,在大多数语言中,如果要实现 channel 这样的类型,一般是以库的形式进行实现,而 Go 语言将其上升到了语言层面实现,这样虽然显的不够纯粹干净,但这样可以通过更方便的语法实现 select 这样强大的功能,如果实现为库的形式,是难以做到这个程度的。
一个简单的服务模板
在这个例子中,我们将基于 Go 语言实现一个极简单的服务模板,代码如下:
type Input struct {
Req interface{}
State interface{}
}
type Output struct {
Rsp interface{}
State interface{}
}
type Handler = func(input Input) (Output, error)
type Response struct {
Result interface{}
Error error
}
type InMessage struct {
Req interface{}
OutChan chan<- Response
}
type Service struct {
inChan chan<- InMessage
}
func (service *Service) RpcCall(request interface{}) (interface{}, error) {
outChan := make(chan Response)
service.inChan <- InMessage{request, outChan}
rsp := <-outChan
if rsp.Error != nil {
return nil, rsp.Error
}
return rsp.Result, nil
}
func MakeService(handler Handler, initState interface{}) *Service {
inChan := make(chan InMessage)
go func(state interface{}) {
for {
in := <-inChan
out, err := handler(Input{in.Req, state})
if err != nil {
in.OutChan <- Response{nil, err}
} else {
state = out.State
in.OutChan <- Response{out.Rsp, nil}
}
}
}(initState)
return &Service{inChan}
}
这里的 Service 是一个服务模板,我们通过 MakeService 来创建它。在创建服务模板的时候,我们要求调用者传入一个请求处理函数 handler func(input Input) (Output, error),从类型可以知道,它接受一个请求,然后进行处理,并返回响应。请求和响应中都带有状态,handler 可以借此保存和修改状态,由于模板并不知道状态是什么,因此,MakeService 还要求调用者传入一个初始的状态 initState。然后,MakeService 会启动一个 goroutine,这个 goroutine 不断从 inChan 读入请求,并调用 handler 进行处理,最终将响应通过 outChan 发回给调用方。RpcCall 简单封装了一下从 inChan 输入请求,从 outChan 读取响应的过程。我们可以使用这个模板这样实现一个简单的电话本服务:
type Query struct {
Name string
}
type Insert struct {
Name string
Phone int
}
type PhoneBookService = Service
func (s *PhoneBookService) Insert(name string, phone int) {
s.RpcCall(Insert{name, phone})
}
func (s *PhoneBookService) Query(name string) (int, error) {
phone, err := s.RpcCall(Query{"Tom"})
if err != nil {
return 0, err
}
return phone.(int), nil
}
func MakePhoneBookService() *PhoneBookService {
return MakeService(func(i Input) (Output, error) {
st := i.State.(map[string]int)
switch req := i.Req.(type) {
case Query:
x, ok := st[req.Name]
if !ok {
return Output{nil, nil}, fmt.Errorf("%v no found", req.Name)
}
return Output{x, st}, nil
case Insert:
st[req.Name] = req.Phone
return Output{nil, st}, nil
default:
return Output{nil, nil}, fmt.Errorf("unknonw input: %v", req)
}
}, make(map[string]int))
}
func main() {
service := MakePhoneBookService()
phone, err := service.Query("Tom")
if err != nil {
fmt.Println("query err:", err)
} else {
fmt.Println("query succ:", phone)
}
service.Insert("Tom", 123456)
phone, err = service.Query("Tom")
if err != nil {
fmt.Println("query err:", err)
} else {
fmt.Println("query succ:", phone)
}
}
这个电话本功能很简单,只有 Insert 和 Query 两种方法。Service 模板的作用是将整个 Go 语言的并发模型封装在函数调用内,从 PhoneBookService 的实现中,我们可以发现,这里没有任何 goroutine 的产生代码,也没有 channel 的使用,仅仅出现了简单的函数调用。对于 handler 的实现,里面也是一个简单的循环。这样一来,具体服务的实现者就不需要接触 Go 语言的并发模型,也可以实现简单的服务了。
执行程序,我们可以看到如下的输出:
query err: Tom no found
query succ: 123456
在这里,我们可以注意到 Go 语言的另外两点设计,一个是使用错误返回值的错误的处理方式,另一个是只有接口没有泛型。
首先说错误处理。
Go 语言的错误处理方式有很大争议,支持者认为,Go 的错误返回值方式让错误的出现更加明确,不会扰乱让开发者的逻辑,更清晰地表达了意图。而反对者则认为异常抛出的缺失导致 Go 代码的错误处理非常冗长,且频繁打断主要逻辑。显然,这两个观点都有各自的道理,且在不同的语言里我们也看到了这两种错误处理方式的广泛应用,但是我认为在 Go 的并发模型的限制下,使用错误返回值的方式是一个合理正确的选择。如前所述,Go 语言每当创建一个 goroutine 之后,这个 goroutine 就和创建者没有什么关系了,它甚至不能像线程一样直接被等待执行结束。goroutine 和 goroutine 唯一进行关联的方式就是通过 channel 的消息传递。假设 Go 语言支持了抛出异常,那么,一个 goroutine 中抛出了一个没有被捕获的异常,这个异常将会导致什么呢?由于没有任何实体有责任捕获并处理这个异常,因此这里唯一正确的处理方式就是 panic 了,这个处理显然是很不可靠的,一个 goroutine 中的异常导致整个系统的 panic 无法让人接受。当然,有人会说,那在每个 goroutine 的最顶层都 try-catch 一下就可以了。那问题又来了,try-catch 之后呢?如果出现了一个已经被抛到顶层的异常,说明这个异常应该无法被这个 goroutine 自身处理了,应该交由其监视者来处理,例如上面的例子中,调用者就应该负责处理 Service goroutine 中产生的错误。那么,在这个时候,唯一正确的做法就是将抛出的异常以错误值的形式通过 channel 发送给监视者,以期待上层能够正确处理这个异常。那么这样一来,开发者就必须频繁混合使用两种错误处理方式,这样的开发方式是极其混乱且易错的。所以,使用错误返回值的方式应该是更加合理统一的方式了。
第二点,关于泛型的问题。
Go 语言只有接口没有泛型,这导致了很多麻烦,例如我们无法实现带有静态检查的自定义容器,泛型算法也难以实现。许多 Go 语言的开发者对于泛型的看法是:你不需要这个。我承认在实际工程中泛型的使用场合远少于接口,但是,即便从服务开发这个 Go 语言的主战场来看,泛型的必要性也依然很高。从上面的例子中我们可以看到,代码中大量充斥着 interface{} 和对 interface{} 的类型转换。其原因就是我们在实现这样一个服务模板时,我们并不知道模板的使用者需要处理怎样的 request,返回怎样的 response,也不知道这里的 state 是什么。由于泛型的缺失,我们的代码相当于失去了静态的类型检查,将静态的类型错误变为了运行时错误,这样一来,Go 语言的静态能力就缺失了很多,甚至我们可以说,Go 语言泛型的缺失使得 Go 语言在类型安全性上不如带有泛型能力的静态类型语言,却比这些语言在使用上还要更啰嗦(各种类型转换和错误判断)。
总结
Go 语言是一个原生支持并发的语言,其并发模型基于 CSP 模型。通过使用 Go 语言的并发能力,我们可以设计出非常直观易懂的代码。经过上面几个例子的分析中我们可以看出,从并发模型和并发程序设计的角度来看,Go 在语言设计上的优势在于:
- 拥有轻量的应用层进程 goroutine,允许开发者基于大量 goroutine 来设计并发程序
- First class channel 的支持,使得 goroutine 之间能够很轻易地相互合作
select关键字的随机能力使得开发者可以基于 channel 来对程序实现调度- 使用返回值的形式处理错误,很好地契合了 goroutine + channel 的并发模型
而 Go 在语言设计上的劣势在于:
- 泛型的缺失导致许多程序设计变得脆弱,增加代码量且失去了安全性